Well, while I'm working on the design of the new LEGO test rig (see test1), I'm getting back into the tank project. My generic goal for this long term project is to design a table top robotic game that will be a cross between a live card game and robotics. So far I will have two tank platforms to test all the robotic modules so that I can prototype the gameplay based around those features.

TA1 (aka: whydontyouworkyou...)
You may ask yourself “Where the heck are you going with this?”, and that is a good question since I don't have a final answer yet. You see, I like building stuff and I like cool-unusual-geeky-things that I can't afford so, many times, if I want something I have a tendency to build it. My latest crazy idea came during the last Christmas vacation when my wife and I started playing a live card game called Android Netrunner. No it has nothing to do with mobile phones.

The box
I found this game so cool that I had
this crazy idea to reinvent the same level of gameplay using robots
instead of cards. Why? Well... why not? Sooooo this is going to take
a long time and I have to start by testing what kind of electronic
interactions/capabilities the tanks can have. Once I have enough
working features I will design the basic gameplay around them and
build the two game tanks. Like I said... long
term and so geeky that it technically falls into the nerd realm.
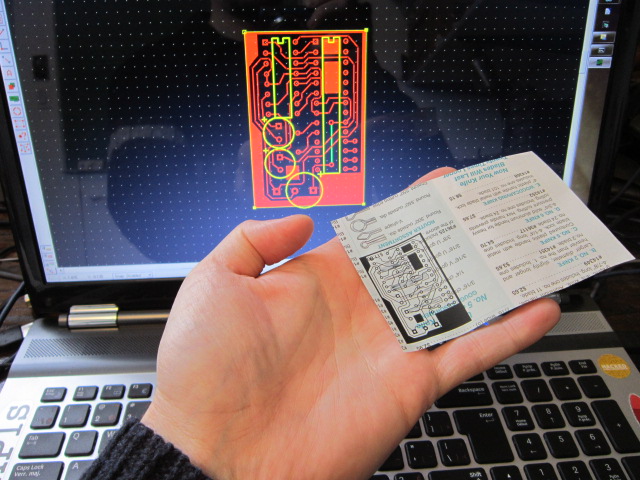
Here is a short update: The mobility
base is composed of a robotic tank kit and a homemade DC motor driver. The motor driver PCB still needs a bit of redesign but it's functional for now and that... is good enough. Here I am building one of the two tank kits:
For now, the tank is controlled using an Android phone via bluetooth and I'm ready to start testing the
other features like the laser, IR proximity sensors, light sensors,
Ultrasonic range finder, etc...

Starting now, I will also tweet the
updates using the hashtag #livetankgame.